
|
|
4D打印微型软体机器人,可用于药物控释、微结构搬运发表时间:2021-12-20 13:18 据麦姆斯咨询报道,近日,中国科学院沈阳自动化研究所机器人学国家重点实验室微纳米自动化课题组在磁热联合驱动的微型软体机器人研究中取得新进展。科研人员利用4D打印技术制备的微型软体机器人在近红外光和磁场的联合驱动下,展示了弯曲形变、夹取及搬运功能,在微结构搬运、药物控释等方面展现出重要的应用前景。相关研究成果发表在Composites Part B-Engineering上。 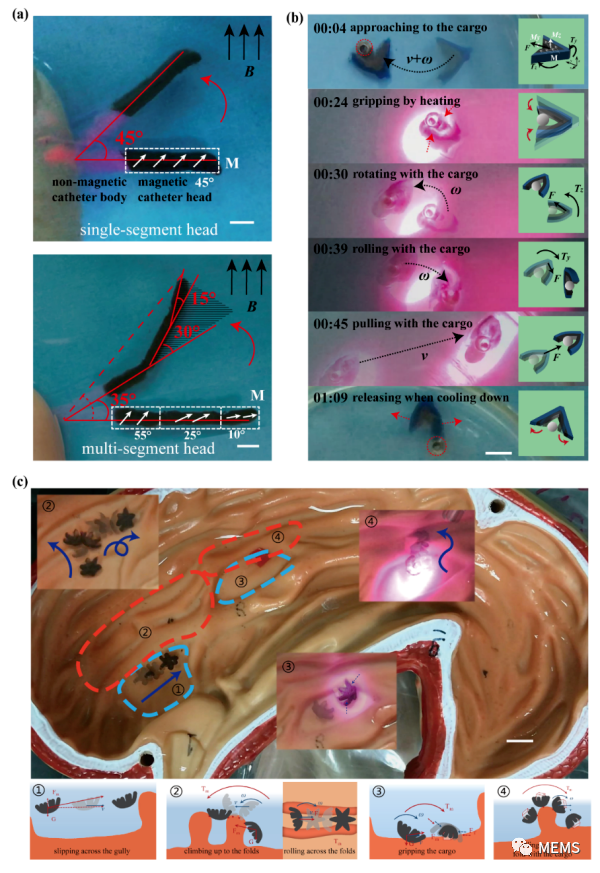 仿水母机器人在胃模型中的运动与夹持搬运 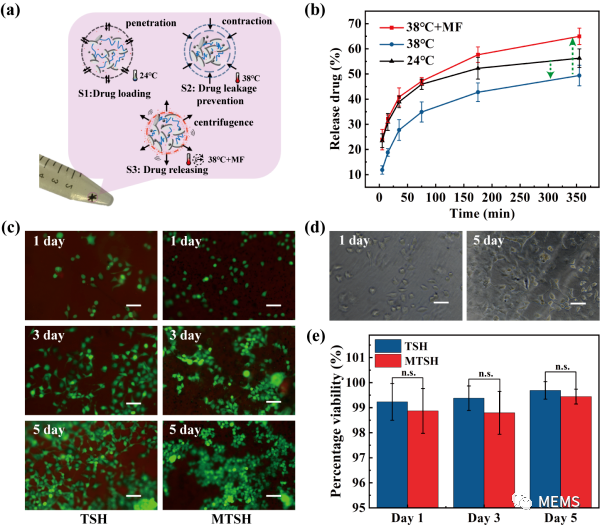 微型软体机器人可作为药物载体且具有极佳的生物相容性 该课题组专注于小尺寸机器人研究,从毫米级、微米级到纳米级机器人开展了系列研究,在磁驱动毫米机器人、光驱动毫米机器人、热驱动毫米机器人、气泡微米机器人、细胞微米机器人、混合驱动纳米机器人等方面取得了研究成果【相关成果发表在Small(2019)、Advanced Intelligent Systems(2021)、ACS Applied Materials & Interfaces(2019/2020/2021)、Chemical Engineering Journal(2021)、IEEE Robotics and Automation Letters(2021)、Lab on a Chip(2016)】。 文章来源:麦姆斯咨询(“微流控”公众号) |
